 | |||||||||||
| |||||||||||
|
| |||||||||||
| |||||||||||
|
Régulateur PIDDernière mise à jour le 03/12/2003, 23702 visites.Ce document est le rapport sur la construction d'un régulateur PID (régulateur Proportionnel Intégral Dérivé) que l'on a réalisé en TP. Il utilise des amplificateurs opérationnels (AOP). Construction et étude d'un régulateur PID
Il nous est proposé de construire un régulateur continu à partir d'amplificateurs opérationnels et d'autres éléments. Un régulateur PID effectue un traitement de l'écart E entre la grandeur de consigne et la grandeur de sortie (régulée).
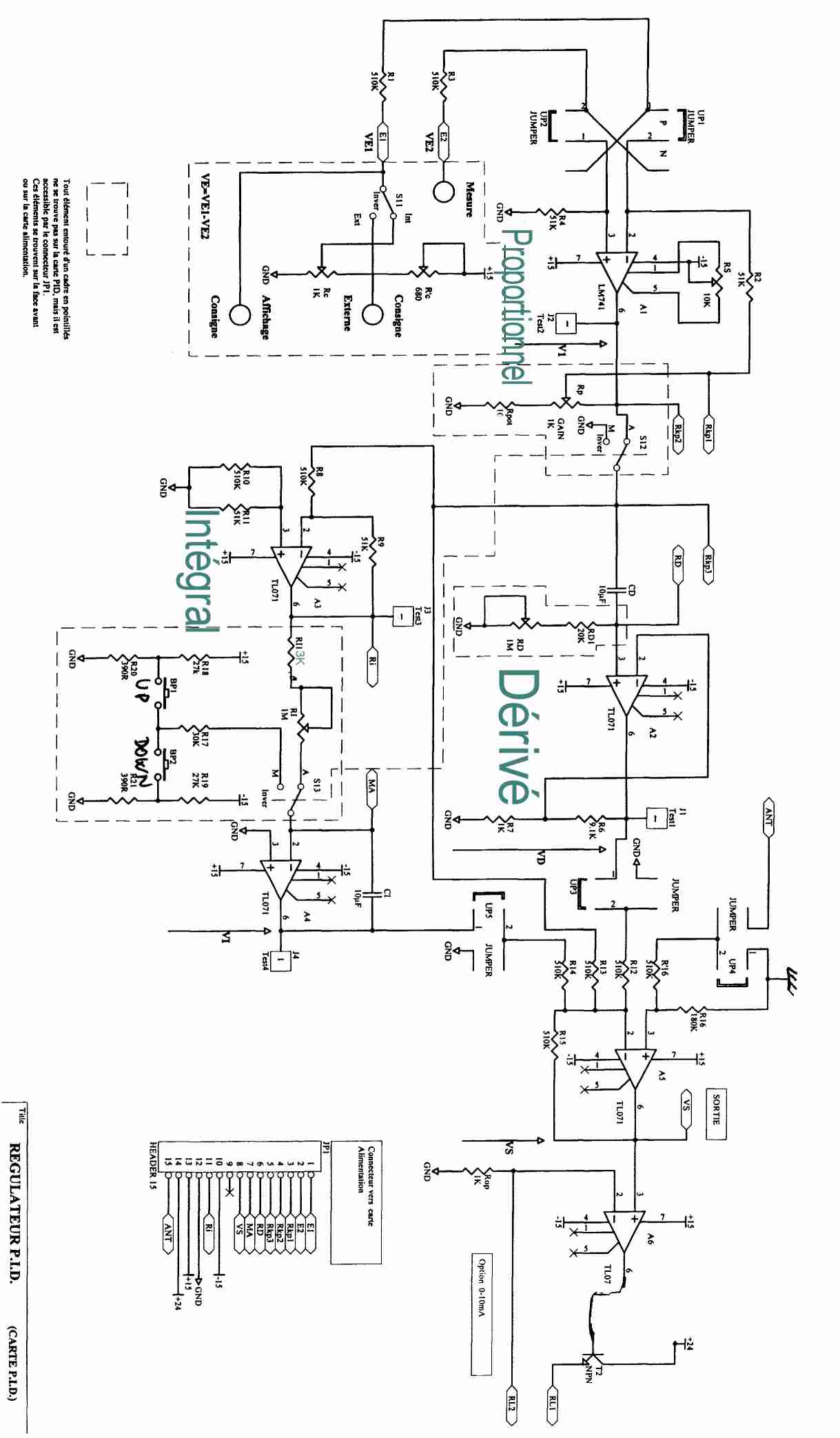
Les valeurs des différents composants sont calculées de telle manière qu'on ait K qui varie de 0.1 à 10, Ti de 0.3 à 100s, Td de 2 à 100s, Kd=10. De plus, la consigne interne varie de 0 à 10V. Voici le circuit électronique après en avoir calculé les différents éléments :
Après avoir monté le PID, nous pouvons passer au calibrage des différents potentiomètres. Ceux-ci sont réglés de telle façon qu'on ait une sortie de 0 à 10V et que l'affichage corresponde aux valeurs réelles des tensions. Les tests sont réalisés à l'aide d'un procédé à contrôler. Ce procédé est décrit par: 1.5834/[(1+39.8662p)(1+14.7094p)] Nous avons utilisé deux méthodes pour régler le PID: Le procédé doit être modélisé par une fonction de transfert du 2° ordre de la forme : Gp(p) = Cette fonction de transfert est
caractérisée par son module Les critères dAström-Hägglund permettent de fixer la marge de phase Φ s et la période opérationnelle Ts de la réponse en boucle fermée. Ensuite, pour répondre aux spécifications fixées, on dispose de formules permettant le calcul direct des paramètres K, Ti, Td : ●K = ● Td = et Φc = π + Φs Φp(jωs) ● Ti = Td x α (α =4) Choix de Φs et Ts : Daprès le critère du Revers, il faut choisir une marge de phase positive pour assurer la stabilité du système. Cependant, celle-ci ne doit pas trop séloigner du point critique car le système sen trouverait ralenti. Ainsi, il est conseillé de choisir une marge de phase Φs de lordre de 45°. La période opérationnelle Ts peut être approximée par Ts = (2 à 8) t. Dans notre cas on prendra Ts = 50s. Calcul des paramètres : Pour notre système, nous avons donc fixé : Φs = 45° Ts = 50 s => ωs = 0.12566 rad/s On en déduit alors les paramètres du P.I.D : K = 4.79 Td = 4.37 Ti = 17.46 On remarque que le comportement
en boucle fermée est très satisfaisant. En
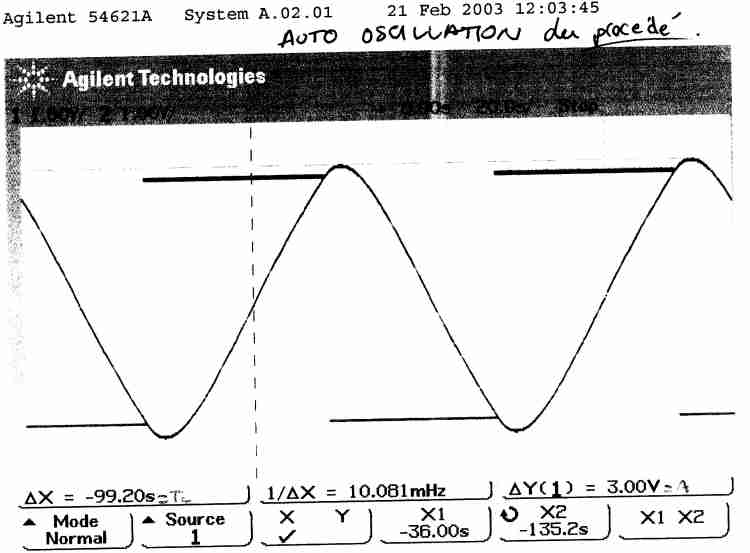
Cette méthode permet d'avoir un PID adaptatif. En effet on peut remesurer les paramètres du PID chaque fois que nécessaire en le remplacant par une bascule de schmitt (relais) dans la boucle de régulation du procédé.
Calcul du PID : Kp=(sin²Fs + xcosFs)/(x²+sin²Fs)=1.493 Td=(-B+(B²+(4/a))^(-1/2))/(2wc)=4.2514s Ti=aTd=17.0055s avec x=(pi(A²-h²))/(4d) On a vérifié expérimentalement la validité de ces calculs en mesurant la réponse à un échelon unitaire du procédé régulé par le P.I.D. Le résultat est tout à fait satisfaisant.
La consigne a un effet sur la sortie du PID : la réponse à un échelon de 1V n'est pas l même comme on peut le constaté sur les deux échelons :
On constate que pour un échelon de la consigne de 5V la régulation est plus sacadé que pour échelon de 1V. Ceci est du à la saturation de la sortie du PID comme on peut le voir sur le tracé de l'oscilloscope.
On suppose que la tolérance relative de fabrication des résistances R1
et R4 est s = ∆ Ri/Ri, on a alors : Vs = i2 R4 i1 R2 avec i1 = donc Vs = VE2 En prenant compte des valeurs réelles des résistances on obtient : Vs = VE2 (1 + Si on se place dans le cas ou la dissymétrie est la plus importante on a : Vs = VE2
En factorisant on obtient : Vs = Ve Gd + Vm
La tension de sortie de A1 est de : Vs = Si on considère une tension de décalage Vo = 5 mV, lerreur absolue de la régulation causée par cette tension est alors de :
Si on considère un RRMC de 70 dB, lerreur relative à la consigne VE1 de la régulation est alors de : Vs =
Ainsi, pour VE1 = 10 V, on a Vs = R2/R1 (Ve + Vs1 = Ve Gd [1 + Avec Gd = (I) : Influence de la tension de mode commun (II) : Influence de la tension de décalage |











 et i2 =
et i2 = 